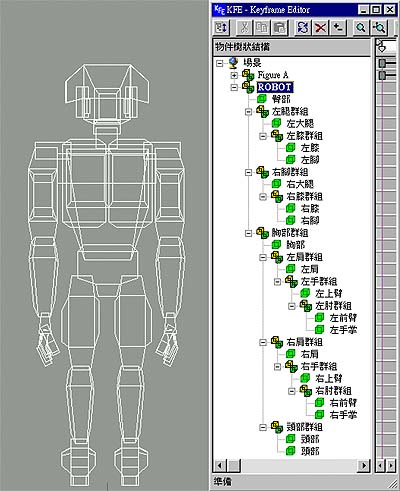
| page 4-2 適用版本:Life Forms 3.5 + trueSpace4.0 以上 發表日期:1999.9.13 匯入 Life Forms 檔案 (二)大家最關心的應該是如何將這些精采的動作套用在 trueSpace 中的模型上,下面 我們將為各位說明在 trueSpace 之中利用現有的工具來合成這些動作。 B 使用關鍵畫面編輯器 在 trueSpace 之中二個物件的連結階層若是相同的話,您可以使用關鍵畫面編輯器 輕易地將某一模型的關鍵畫面複製到另一個模型上,其中包含每一個子關節的動作。 這邊我們就不特別的說明如何建立連結方式了,基本上我們只要符合以下的連結方式即可。 左(右)手臂:肩->上臂->前臂->手掌->手指 ->表示為向下連結的關係 基本上是以這五層關節作為人體架構。 上半身連結:胸部-左手臂-右手臂-頭部 -表示為等位連結的關係 完成後的 trueSpace 全身連結關係如圖7。
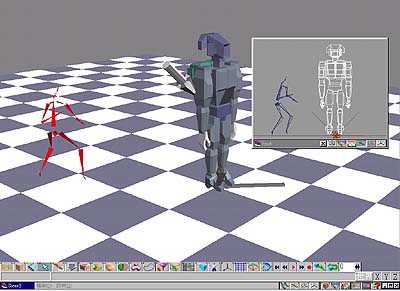
範例檔案:Scene2.zip Size=44K trueSpace4 場景檔 請載入 Scene2.scn 的檔案,這個檔案中我們已經先設定好一個機器人 (ROBOT) 的 連結設定,及一個 Life Forms 中載入的模型檔案 (Figure A),如圖8。
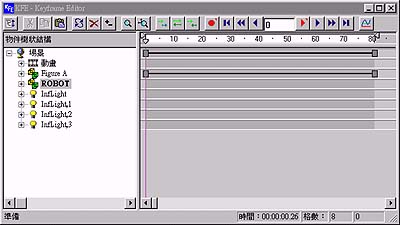
這二者的連結設定完全一致,您可以按下鍵盤的向下即向右鍵來檢查其連結的關係。 該如何將 Figure A 的動畫複製到 ROBOT 物件上,請參考以下的步驟: 1. 開啟關鍵畫面編輯器,FigureA 的模型已經設定動畫了,我們可以看出 FigureA 的軌跡上已經有動畫了,如圖9。您可以按下播放按鈕,看到它的動畫。
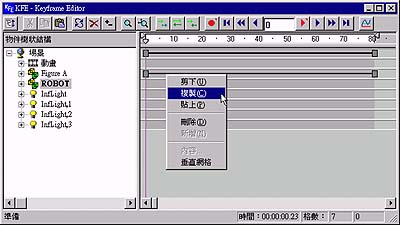
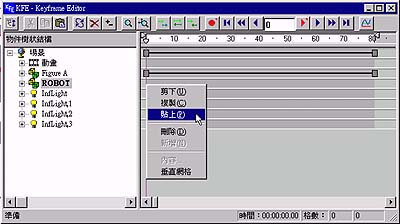
2. 直接在 FigureA 的動畫軌跡上按下滑鼠右鍵,可開啟一個快顯功能表,請選擇 "複製",如圖10。
※在步驟 2 中您不需要展開 FigureA,因為在這邊我們所選取的"複製"會將其所有 關節的動畫都複製下來。 3. 然後選取 ROBOT 物件,在其軌跡面板上(靠近第0格的位置)按下滑鼠右鍵,同樣 的可以開啟快顯功能表,如圖11。選擇"貼上"。
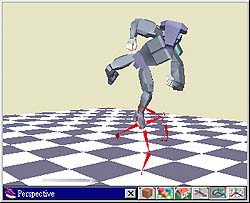
4. 按下播放按鈕,您可以看到 ROBOT 與 FigureA 有著相同的動作,如圖12。此時 的 ROBOT 懸在半空中,我們可以使用路徑的方式將其調整到地面。
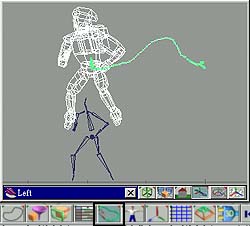
5. 按下"路徑"按鈕。我們可以看到 ROBOT 前方出現綠色的線條的,這是 ROBOT 的 運動路徑,如圖13。
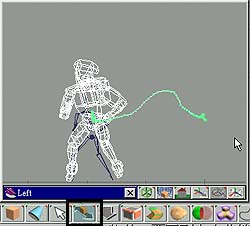
6. 選擇移動物件工具,將它拉到貼在地面上。這個動作是將一整段的關鍵畫面的 路徑進行位移,所以您必須在啟動路徑的模式下,才能進行此項操作。
OK,我們已經將其設定在地面上了,如圖14。事實上,在後面的關鍵畫面之中,還會 有一些動作,ROBOT 的腳會沉在地面下,在進行 Render 前,我會建議您先調整這些 動作,設定在地面上。 範例檔案:Scene3.zip Size=171K trueSpace4 場景檔 |